最短路相关问题(Shortest Path Problems)
最短路算法介绍
在最短路问题中,我们一般分为($n$为节点数,$m$为边数):
$$最短路问题\begin{cases}
单源最短路问题——求一个点至其他点的距离\begin{cases}
所有变权均为正数\begin{cases}
朴素版Dijkstra算法——常用于稠密图(贪心)\quad O(n^2)
堆优化版Dijkstra算法——常用于稀疏图\quad O(mlogn)
\end{cases}
存在负权边\begin{cases}
Bellman-Ford算法(离散数学)\quad O(nm)
spfa算法(优化版的Bellman-Ford算法,但如果限制遍历边数,则不可使用)\quad 一般情况:O(m),最坏O(nm)
\end{cases}
\end{cases}\\\\\
多源汇最短路问题——求任选两个点a、b,求a到b的最短路:Floyd算法(动态规划)\quad O(n^3) \end{cases} $$
注:最短路问题难点在于模型转换,也就是如何将题目转换为最短路问题来做,所以重要得不是学习证明,而是学习使用和题型积累。 ***
朴素Dijkstra算法
算法步骤:
- 初始化距离:dist[1] = 0 —— 起点到起点距离为0,其他点到起点dist[i] = 正无穷(极大的数即可,如:0x3f3f3f3f)
- 循环$n$次,第i次循环至少能找到1个到起点边数为$i$的节点,为什么说Dijkstra算法基于贪心就是这个原因,如果找到一条点$u$到起点的最短路径,那么该路径上的任何一个点 $u^{‘}$到起点的子路径也是其最短路径,那么由贪心可知,每次到达$u^{‘}$的路径都是最短路径,那么到达$u$的路径也必定是最短路径。
- 在第i次循环找到此时最短路径后,更新与$u^{‘}_i$相连的未确定最短路径的节点距离,也就是找到使用$i+1$条边,是否能够找到另一个节点到起点的距离比使用小于$i+1$条边到起点距离更短的路径。
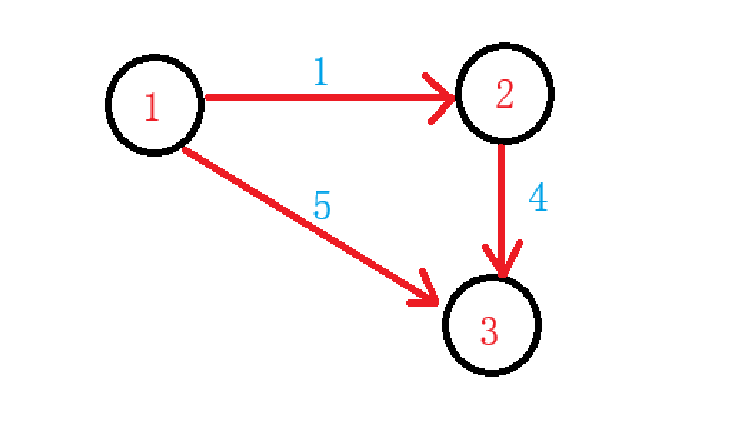
思考:在第二步中,我们说了这么一句话——第i次循环至少能找到1个到起点边数为$i$的节点。想一想,如果我们第$i$次循环找到不止$1个$到起点边数为$i$的节点呢(如下图)?再考虑这个算法是否还有可以优化的地方呢?
 ***
***
#pragma GCC optimize(2)
#include <cstring>
#include <iostream>
#include <algorithm>
const int N = 510, M = 2 * N;
int n, m, d;
int g[N][N];
int dist[N];
bool st[N]; //标记确定最短路径的点
int dijkstra()
{
std::memset(dist,0x3f,sizeof dist);
dist[1] = 0;
for(int i = 1;i<=n;i++)
{
int t = 0; //初始化为0方便后面寻找最短路径
for(int j = 1;j<=n;j++)
{
if(!st[j]&&(dist[j]<dist[t]))
t = j;
}
if(t==n) return dist[n]; //这里就是让大家思考的地方,如果我们已经找到了n为我们此时的最短路径,直接返回就完事了,但这不是最优的优化,接下来会介绍最优的优化部分
st[t] = true;
for(int j = 1;j<=n;j++) //更新与t相连的节点的新路径长度
dist[j] = std::min(dist[j], dist[t] + g[t][j]);
}
if(dist[n]==0x3f3f3f3f) return -1;
return dist[n];
}
int main()
{
std::ios::sync_with_stdio(false);
std::cin.tie(0);
std::cout.tie(0);
std::cin >> n >> m;
memset(g, 0x3f,sizeof g);
while(m--)
{
int a, b, c;
std::cin >> a >> b >> c;
g[a][b] = std::min(c, g[a][b]);
}
std::cout << dijkstra();
}
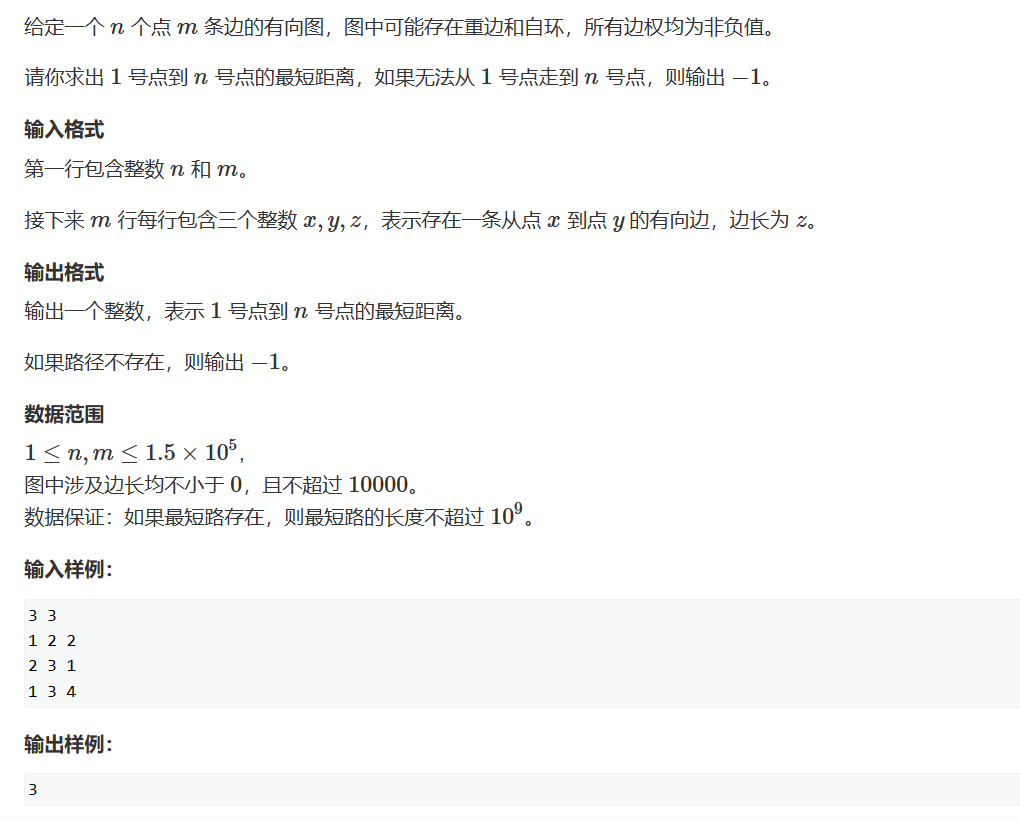
堆优化的Dijkstra算法
上文中做的思考,可以考虑到在每次更新前我们都需要找到最短的那条路径的节点,但是它的时间复杂度是$O(n)$
但事实上我们可以通过小顶堆来维护我们的最小值,如此的话我们寻找最小值的时间复杂度就是$O(1)$,而维护堆的时间复杂度为$O(logn)$,故整个代码的时间复杂度就被优化为了$O(mlogn)$。
#pragma GCC optimize(2)
#include <iostream>
#include <queue> //priority_queue在这里!
#include <cstring>
#include <utility> //pair在这里!
#include <algorithm>
using pii = std::pair<int, int>;
const int N = 1500010;
int next[N], e[N], h[N],w[N], idx;
int dist[N];
bool st[N];
int n, m;
std::priority_queue<pii,std::vector<pii>,std::greater<pii>> head; //以pii.first为升序排序的优先队列
void add(int a,int b,int c)
{
e[idx] = b, next[idx] = h[a], w[idx] = c, h[a] = idx++;
}
int dijkstra()
{
std::memset(dist, 0x3f, sizeof dist);
dist[1] = 0;
head.push({0,1}); //<距离,节点编号>
while (head.size())
{
auto t = head.top();
head.pop();
int ver = t.second, d = t.first;
if(ver == n) return dist[n]; //如果已经找到到n的最短距离,直接返回其值即可
if(st[ver]) continue; //如果该节点被更新过,跳过
st[ver] = true;
for(int i = h[ver];~i;i = next[i]) //枚举更新与ver节点相连的节点距离
{
int j = e[i];
if(dist[j]> d + w[i])
{
dist[j] = d + w[i];
head.push({ dist[j],j });
}
}
}
return -1; //如果始终没有将节点$n$推入堆中,说明存在环或此图不连通,节点1无法到达节点n
}
int main()
{
std::ios::sync_with_stdio(false);
std::cin.tie(0);
std::cout.tie(0);
std::memset(h, -1, sizeof h);
std::cin >> n >> m;
for(int i = 0;i<m;i++)
{
int a, b, c;
std::cin >> a >> b >> c;
add(a, b, c);
}
std::cout << dijkstra();
}
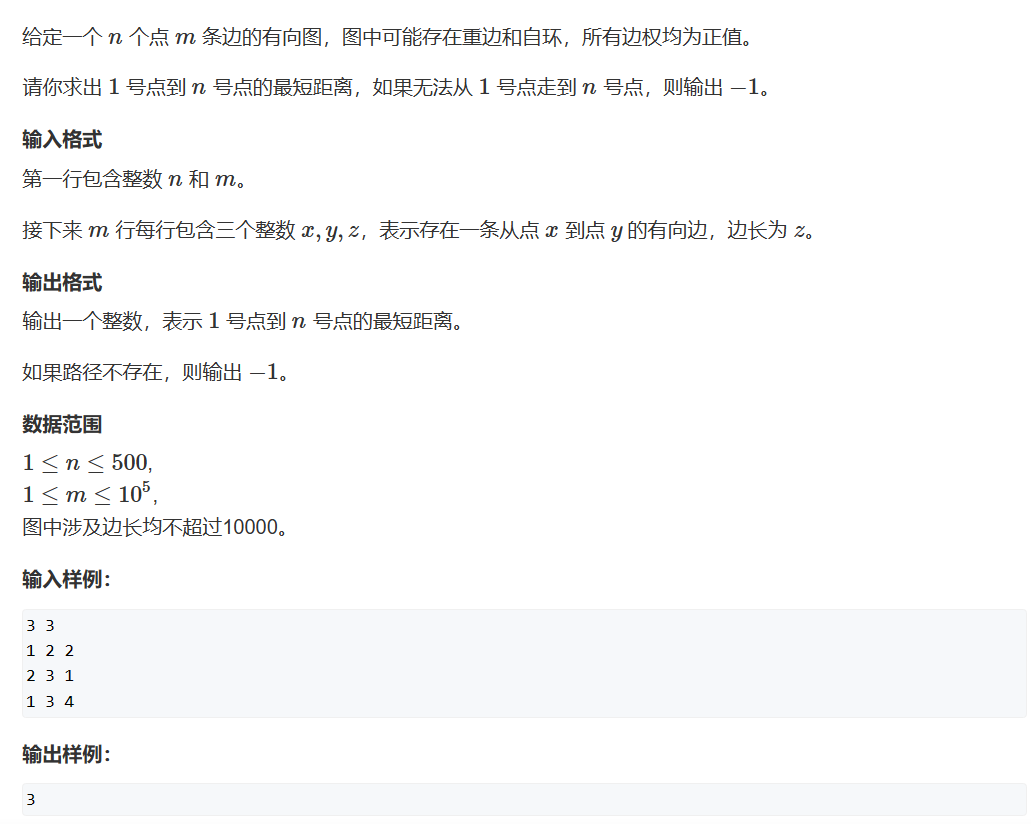
Bellman-Ford算法
Bellman-Ford算法不需要考虑边与边、之间的关系,我们只需要存下来这个边并使得我们能遍历到所有边即可,并不需要规定只能遍历某个点引伸出的某条边。
伪代码:
for(int i = 1;i <= n; i++)
{
for(循环所有边a, b, w) //指存在a -> b,权重为w 的边
{
dist[b] = std::min(dist[b],dist[a] + w);
}
}
是不是很熟悉呢?
回忆一下朴素版dijkstra算法:
for(int i = 1;i<=n;i++)
{
...
for(int j = 1;j<=n;j++) //更新与t相连的节点的新路径长度
dist[j] = std::min(dist[j], dist[t] + g[t][j]);
}
此时再思考一下做朴素版dijkstra算法时给的小思考,我们就会发现,其实这就是纯纯暴力算法啦!
这个算法的思路就是(和dijkstra算法一毛一样啊!!!):循环$n$次,第i次循环至少能找到1个到起点边数为$i$的节点
为什么说Dijkstra算法基于贪心就是这个原因,如果找到一条点$u$到起点的最短路径,那么该路径上的任何一个点 $u^{‘}$到起点的子路径也是其最短路径,那么由贪心可知,每次到达$u^{‘}$的路径都是最短路径,那么到达$u$的路径也必定是最短路径。
但是,此时我们不考虑我们是否已经是找到了最短路,也就说默认我们不懂贪心操作,就是无脑地找到使用$i$条边是否可以找到到达节点$n$的路径,并且持续维护其中的最小值罢了。
但此题的重点是考虑到有负权边,当存在负权边和负权回路时因为负数的存在,每次回路的循环都会造成路径长度的不断减小,并且如果此时负权回路处于从起点到终点的路径上时,我们就不会存在最短路。
另一个需要考虑到的问题是更新的问题,当我们在每次大循环中需要调用dist值,但有多条边连至同一个点时,我们除第一次更新会造成数据污染而导致答案错误,所以我们使用一个备份去解决这个问题。
#pragma GCC optimize(2)
#include <iostream>
#include <algorithm>
#include <cstring>
const int N = 10010;
int n, m, k;
struct line
{
int a;
int b;
int w;
}lines[N];
int dist[N];
int backup[N];
int main()
{
std::ios::sync_with_stdio(false);
std::cin.tie(0);
std::cout.tie(0);
std::memset(dist, 0x3f, sizeof dist);
std::cin >> n >> m >> k;
for (int i = 1; i <= m; i++) std::cin >> lines[i].a >> lines[i].b >> lines[i].w;
dist[1] = 0; //初始化
for(int i = 1;i<=k;i++) //更新出的dist的含义是经过不超过i条边的最短路径长度
{
std::memcpy(backup, dist, sizeof dist); //每次备份一遍以防数据污染
for(int j = 1;j<=m;j++)
{
dist[lines[j].b] = std::min(backup[lines[j].a] + lines[j].w, dist[lines[j].b]);
}
}
if (dist[n] >= 0x3f3f3f3f/2) std::cout << "impossible";
else
std::cout << dist[n];
}